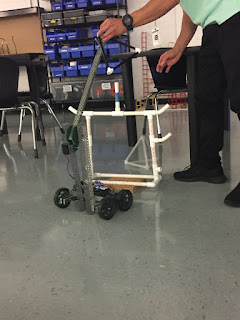
continuing the arm (week 9)

Today we will continue working on our robots arm. The challenge we're working on forces us to make sure that the arm is working properly and efficiently. Right now we're having problems with the arms motor and picking up the ball given to us. We will continue to work at it until we have it right.